行星滚柱丝杠电动缸精确度分析
- 2018-11-21 10:44:00
- 陆启蒙 原创
- 9033
电动缸是将伺服电机与丝杠一体化设计的模块化产品 ,将伺服电机的旋转运动转换成直线运动 ,同时将伺服电机最佳优点 ———精确转速控制 、精确转数控制和精确扭矩控制 ———转变成精确速度控制 、精确位置控制和精确推力控制 。与液压缸 、气缸相比 ,电动缸总效率可提高 20 %~ 30%, 并能实现高精密运动控制 。在以电动缸为运动支链的高精度加工机床上 ,分析工件加工质量和精度时 ,电动缸自身精确度的影响是不可忽略的一部分 。
1 电动缸精确度分析
图 1 为 EXLAR FT 系列电动缸结构简图 ,伺服电机带动丝杠转动 ,丝杠的转动经过滚柱转变成螺母组件的轴向位移 。当电动缸受到轴向力 F 作用时 ,轴向变形总量可分为以下几个部分 。
1.1 丝杠支承轴承的轴向位移
对于内外圈滚道都是线接触的圆锥滚子轴承受轴向载荷时的位移为:

式中 : F 为电动缸轴向负载 ;F a0 为轴承预紧力 ;Z为滚子个数 ; l 1 为滚动体有效长度;α为受载后轴承实际接触角 。
1 .2 滚柱与丝杠及螺母的接触变形
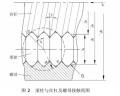
a .接触点主曲率 。图 2 为滚柱与丝杠及螺母接触简图 ,由图可知滚柱与丝杠的接触点 S 处主曲率分别为 :
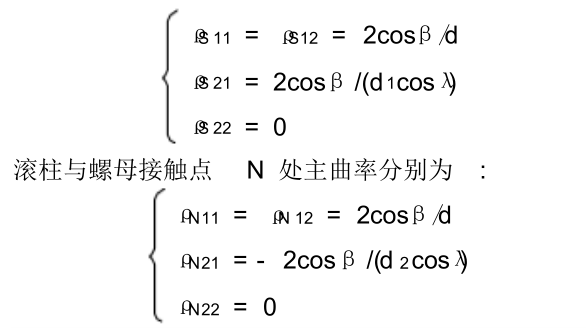

式中 : β为滚柱接触角 ;λ为丝杠螺旋升角 ; d 为滚柱中径 ; d 1 为丝杠有效直径 ;d 2 为螺母有效内径 。
b .单个滚柱接触法向力 Q 。假设各个滚柱是理想滚柱 ,没有制造误差 ,则根据图 2 所示 ,由几何关系可得 :Q =Fisinβcosλ式中 i 为滚柱个数 。
c.轴向变形量 。将主曲率值及接触力代入赫兹理论接触变形量求解公式[ 1,3- 4],可得在接触点 S ,N 处的接触变形 δ S , δ N , 再由几何关系得其轴向变形量为 :

式中 : E ,E 1 ,E 2 分别为滚柱 、丝杠 、螺母的弹性模量 ;ν,ν 1 ,ν 2 分别为滚柱 、丝杠 、螺母的泊松比 ;K( e N )πm aN,K( e S )πm aS可根据主曲率函数 F( ρS ) ,F( ρ N ) 查表得出 ;∑ ρS ,∑ ρN 分别为接触点 S,N 处的主曲率和 。
1.3 丝杠螺纹的螺纹牙的弹性变形量由螺纹弹性变 形分析理论[ 5]可知 ,在分析螺纹牙弹性变形量时 ,可以把丝杠看作是直径为丝杠有效直径 d 1 的实心圆柱 ( 同理 ,把螺母看作内径为螺母有效内径 d 2 ,外 径为螺母外径d′2 的空心圆柱) ,螺纹牙受载情况如图 3 所示 ,其几何尺寸为 :丝杠导程 p = 4a ,a = 2b ,b = 2c ,α= 45°。
本文在计算滚柱丝杠副接触刚度过程中考虑的都是理想状态 ,滚柱尺寸一样 ,周围接触均匀 ,这样刚度最高 ,但由于实际滚柱尺寸不可能完全一样 ,导致加载开始时只有几个滚柱受力 ,当加载到一定程度各个滚柱才会逐渐全部受力 ,此部分的计算并没有考虑这方面原因 ,因此计算结果会有所偏小 。这部分误差对计算结果的影响程度可以通过滚柱精度分组进行降低 ,这还有待继续研究 。
3 结 论
通过对影响行星滚柱丝杠副电动缸精确度的各部分进行分析 ,得出电动缸的丝杆副接触刚度及丝杠支撑轴承刚度对其影响较大 ,尤其是丝杠副这部分的接触刚度是个薄弱环节 ,对电动缸总体精确度有一定限制 ,故在设计和选择电动缸时 ,应充分考虑 。



- [焊接技术] 管板斜45°怎么焊接,精华都在这里了! 2020-10-24
- [故障维修] 导电嘴磨损严重的原因及解决办法 2020-10-19
- [焊接技术] 必须知道的焊缝余高的要求与处理办法 2020-10-16
- [焊接技术] 螺柱焊焊接背面印痕处理方法! 2020-07-17
- [行业资讯] 管子与管板焊接技术规程 2018-11-27
- [焊接技术] 电镀前螺纹尺寸的确定 2018-11-26






- static/file/GBT 19867.4-2008 激光焊接工艺规程12.html 2019-12-25
- static/file/GBT 2652-2008 焊缝及熔敷金属拉伸试验方法11.html 2019-12-25
- static/file/GBT 16672-1996 焊缝-工作位置-倾角和转角的定义11.html 2019-12-25
- static/file/GBT 16745-1997 金属覆盖层产品钎焊性的标准试验方法10.html 2019-12-25
- static/file/GBT 17853-1999 不锈钢药芯焊丝11.html 2019-12-25
- static/file/GBT 15169-1994 钢熔化焊手焊工资格考核方法10.html 2019-12-25
- static/file/GBT 15579.5-2005 弧焊设备安全要求 第5部分 送丝装置10.html 2019-12-25
- GBT 15579.7-2005 弧焊设备安全要求第7部分:焊炬(枪).pdf 2019-12-23
| 联系人: | 韩玉琦 |
|---|---|
| 电话: | 0755-26013200/26013464 |
| 传真: | 0755-26013188 |
| Email: | saw@sawchina.cn |
| QQ: | 2280915288 |
| 微信: | 18682260315 |
| 旺旺: | szhbkj |
| 地址: | 深圳市宝安区石岩街道塘头大道58号 |