伺服电动缸控制方式简介
- 2018-11-22 15:37:00
- 陆启蒙 原创
- 8475
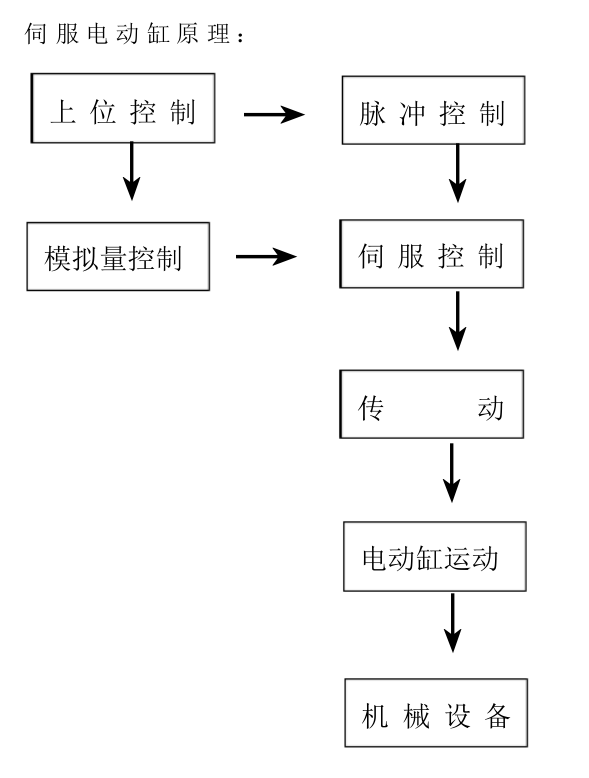
伺 服 电 动 缸 是 将 伺 服 电 机 与 丝 杠 一 体 化 设 计 的 模 块 化 产 品 ,将 伺 服 电 机的 旋 转 运 动 转 换 成 直 线 运 动 , 同 时 将 伺 服 电 机 最 佳 优 点 : 精 确 转 速 控 制 , 精确 转 数 控 制 , 精 确 扭 矩 控 制 转 变 成 精 确 速 度 控 制 , 精 确 位 置 控 制 , 精 确 推 力控 制 ; 实 现 高 精 度 直 线 运 动 系 列 的 全 新 革 命 性 产 品 。
一 般 伺 服 都 有 三 种 控 制 方 式 : 速 度 控 制 方 式 , 转 矩 控 制 方 式 , 位 置 控 制方 式 。
速 度 控 制 和 转 矩 控 制 都 是 用 模 拟 量 来 控 制 的 。位 置 控 制 是 通 过 发 脉 冲 来控 制 的 。 具 体 采 用 什 么 控 制 方 式 要 根 据 客 户 的 要 求 , 满 足 何 种 运 动 功 能 来 选择 。
如 果 您 对 电 机 的 速 度 、 位 置 都 没 有 要 求 , 只 要 输 出 一 个 恒 转 矩 , 当 然 是用 转 矩 模 式 。
如 果 对 位 置 和 速 度 有 一 定 的 精 度 要 求 , 而 对 实 时 转 矩 不 是 很 关 心 , 用 转矩 模 式 不 太 方 便 , 用 速 度 或 位 置 模 式 比 较 好 。 如 果 上 位 控 制 器 有 比 较 好 的 闭环 控 制 功 能 , 用 速 度 控 制 效 果 会 好 一 点 。 如 果 本 身 要 求 不 是 很 高 , 或 者 , 基本 没 有 实 时 性 的 要 求 , 用 位 置 控 制 方 式 对 上 位 控 制 器 没 有 很 高 的 要 求 。就 伺 服 驱 动 器 的 响 应 速 度 来 看 , 转 矩 模 式 运 算 量 最 小 , 驱 动 器 对 控 制 信 号 的响 应 最 快 ; 位 置 模 式 运 算 量 最 大 , 驱 动 器 对 控 制 信 号 的 响 应 最 慢 。
对 运 动 中 的 动 态 性 能 有 比 较 高 的 要 求 时 , 需 要 实 时 对 电 机 进 行 调 整 。那么 如 果 控 制 器 本 身 的 运 算 速 度 很 慢( 比 如 PLC ,或 低 端 运 动 控 制 器 ),就 用 位置 方 式 控 制 。 如 果 控 制 器 运 算 速 度 比 较 快 , 可 以 用 速 度 方 式 , 把 位 置 环 从 驱动 器 移 到 控 制 器 上 , 减 少 驱 动 器 的 工 作 量 , 提 高 效 率 ( 比 如 大 部 分 中 高 端 运动 控 制 器 );如 果 有 更 好 的 上 位 控 制 器 ,还 可 以 用 转 矩 方 式 控 制 ,把 速 度 环 也从 驱 动 器 上 移 开 , 这 一 般 只 是 高 端 专 用 控 制 器 才 能 这 么 干 , 而 且 , 这 时 完 全不 需 要 使 用 伺 服 电 机 。
换 一 种 说 法 是 :
1、 转 矩 控 制 : 转 矩 控 制 方 式 是 通 过 外 部 模 拟 量 的 输 入 或 直 接 的 地 址 的 赋值 来 设 定 电 机 轴 对 外 的 输 出 转 矩 的 大 小 ,具 体 表 现 为 例 如 10V 对 应 5Nm 的 话 ,当 外 部 模 拟 量 设 定 为 5V 时 电 机 轴 输 出 为 2.5Nm: 如 果 电 机 轴 负 载 低 于 2.5Nm时 电 机 正 转 , 外 部 负 载 等 于 2.5Nm 时 电 机 不 转 , 大 于 2.5Nm 时 电 机 反 转 ( 通常 在 有 重 力 负 载 情 况 下 产 生 )。可 以 通 过 即 时 的 改 变 模 拟 量 的 设 定 来 改 变 设 定的 力 矩 大 小 , 也 可 通 过 通 讯 方 式 改 变 对 应 的 地 址 的 数 值 来 实 现 。 应 用 主 要 在对 材 质 的 受 力 有 严 格 要 求 的 缠 绕 和 放 卷 的 装 置 中 , 例 如 饶 线 装 置 或 拉 光 纤 设备 , 转 矩 的 设 定 要 根 据 缠 绕 的 半 径 的 变 化 随 时 更 改 以 确 保 材 质 的 受 力 不 会 随着 缠 绕 半 径 的 变 化 而 改 变 。
2、 位 置 控 制 : 位 置 控 制 模 式 一 般 是 通 过 外 部 输 入 的 脉 冲 的 频 率 来 确 定 转动 速 度 的 大 小 , 通 过 脉 冲 的 个 数 来 确 定 转 动 的 角 度 , 也 有 些 伺 服 可 以 通 过 通讯 方 式 直 接 对 速 度 和 位 移 进 行 赋 值 。 由 于 位 置 模 式 可 以 对 速 度 和 位 置 都 有 很严 格 的 控 制 , 所 以 一 般 应 用 于 定 位 装 置 。 应 用 领 域 如 数 控 机 床 、 印 刷 机 械 等等 。
3、 速 度 模 式 : 通 过 模 拟 量 的 输 入 或 脉 冲 的 频 率 都 可 以 进 行 转 动 速 度 的 控制 , 在 有 上 位 控 制 装 置 的 外 环 PID 控 制 时 速 度 模 式 也 可 以 进 行 定 位 , 但 必 须把 电 机 的 位 置 信 号 或 直 接 负 载 的 位 置 信 号 给 上 位 反 馈 以 做 运 算 用 。 位 置 模 式也 支 持 直 接 负 载 外 环 检 测 位 置 信 号 , 此 时 的 电 机 轴 端 的 编 码 器 只 检 测 电 机 转速 , 位 置 信 号 就 由 直 接 的 最 终 负 载 端 的 检 测 装 置 来 提 供 了 , 这 样 的 优 点 在 于可 以 减 少 中 间 传 动 过 程 中 的 误 差 , 增 加 了 整 个 系 统 的 定 位 精 度 。
谈 谈 三 环 控 制 :
伺 服 电 机 一 般 为 三 个 环 控 制 , 所 谓 三 环 就 是 3 个 闭 环 负 反 馈 PID 调 节 系统 。
最 内 的 PID 环 就 是 电 流 环 , 此 环 完 全 在 伺 服 驱 动 器 内 部 进 行 , 通 过 霍 尔装 置 检 测 驱 动 器 给 电 机 的 各 相 的 输 出 电 流 , 负 反 馈 给 电 流 的 设 定 进 行 PID 调节 ,从 而 达 到 输 出 电 流 尽 量 接 近 等 于 设 定 电 流 ,电 流 环 就 是 控 制 电 机 转 矩 的 ,所 以 在 转 矩 模 式 下 驱 动 器 的 运 算 最 小 , 动 态 响 应 最 快 。
第 2 环 是 速 度 环 ,通 过 检 测 的 电 机 编 码 器 的 信 号 来 进 行 负 反 馈 PID 调 节 ,它 的 环 内 PID 输 出 直 接 就 是 电 流 环 的 设 定 , 所 以 速 度 环 控 制 时 就 包 含 了 速 度环 和 电 流 环 , 换 句 话 说 任 何 模 式 都 必 须 使 用 电 流 环 , 电 流 环 是 控 制 的 根 本 ,在 速 度 和 位 置 控 制 的 同 时 系 统 实 际 也 在 进 行 电 流 ( 转 矩 ) 的 控 制 以 达 到 对 速度 和 位 置 的 相 应 控 制 。
第 3 环 是 位 置 环 , 它 是 最 外 环 , 可 以 在 驱 动 器 和 电 机 编 码 器 间 构 建 也 可以 在 外 部 控 制 器 和 电 机 编 码 器 或 最 终 负 载 间 构 建 , 要 根 据 实 际 情 况 来 定 。 由于 位 置 控 制 环 内 部 输 出 就 是 速 度 环 的 设 定 , 位 置 控 制 模 式 下 系 统 进 行 了 所 有3 个 环 的 运 算 , 此 时 的 系 统 运 算 量 最 大 , 动 态 响 应 速 度 也 最 慢 。
运 动 伺 服 一 般 都 是 三 环 控 制 系 统 , 从 内 到 外 依 次 是 电 流 环 速 度 环 位 置 环 。
1、 首 先 电 流 环 : 电 流 环 的 输 入 是 速 度 环 PID 调 节 后 的 那 个 输 出 , 我 们 称为 “电 流 环 给 定 ”吧 ,然 后 呢 就 是 电 流 环 的 这 个 给 定 和 “电 流 环 的 反 馈 ”值 进行 比 较 后 的 差 值 在 电 流 环 内 做 PID 调 节 输 出 给 电 机 , “电 流 环 的 输 出 ”就 是电 机 的 每 相 的 相 电 流 , “电 流 环 的 反 馈 ”不 是 编 码 器 的 反 馈 而 是 在 驱 动 器 内部 安 装 在 每 相 的 霍 尔 元 件 ( 磁 场 感 应 变 为 电 流 电 压 信 号 ) 反 馈 给 电 流 环 的 。
2、速 度 环 :速 度 环 的 输 入 就 是 位 置 环 PID 调 节 后 的 输 出 以 及 位 置 设 定 的前 馈 值 ,我 们 称 为 “速 度 设 定 ”,这 个 “速 度 设 定 ”和 “速 度 环 反 馈 ”值 进 行比 较 后 的 差 值 在 速 度 环 做 PID 调 节 ( 主 要 是 比 例 增 益 和 积 分 处 理 ) 后 输 出 就是 上 面 讲 到 的 “电 流 环 的 给 定 ”。 速 度 环 的 反 馈 来 自 于 编 码 器 的 反 馈 后 的 值经 过 “速 度 运 算 器 ”得 到 的 。
3、 位 置 环 :位 置 环 的 输 入 就 是 外 部 的 脉 冲 ( 通 常 情 况 下 ,直 接 写 数 据 到驱 动 器 地 址 的 伺 服 例 外 ),外 部 的 脉 冲 经 过 平 滑 滤 波 处 理 和 电 子 齿 轮 计 算 后 作为 “位 置 环 的 设 定 ”, 设 定 和 来 自 编 码 器 反 馈 的 脉 冲 信 号 经 过 偏 差 计 数 器 的计 算 后 的 数 值 在 经 过 位 置 环 的 PID 调 节 ( 比 例 增 益 调 节 , 无 积 分 微 分 环 节 )后 输 出 和 位 置 给 定 的 前 馈 信 号 的 合 值 就 构 成 了 上 面 讲 的 速 度 环 的 给 定 。 位 置环 的 反 馈 也 来 自 于 编 码 器 。
编 码 器 安 装 于 伺 服 电 机 尾 部 , 它 和 电 流 环 没 有 任 何 联 系 , 他 采 样 来 自 于电 机 的 转 动 而 不 是 电 机 电 流 , 和 电 流 环 的 输 入 、 输 出 、 反 馈 没 有 任 何 联 系 。而 电 流 环 是 在 驱 动 器 内 部 形 成 的 , 即 使 没 有 电 机 , 只 要 在 每 相 上 安 装 模 拟 负载 ( 例 如 电 灯 泡 ) 电 流 环 就 能 形 成 反 馈 工 作 。
谈 谈 PID 各 自 对 差 值 调 节 对 系 统 的 影 响 :
1、 单 独 的 P( 比 例 ) 就 是 将 差 值 进 行 成 比 例 的 运 算 , 它 的 显 著 特 点 就 是有 差 调 节 , 有 差 的 意 义 就 是 调 节 过 程 结 束 后 , 被 调 量 不 可 能 与 设 定 值 准 确 相等 , 它 们 之 间 一 定 有 残 差 , 残 差 具 体 值 您 可 以 通 过 比 例 关 系 计 算 出 。。。 增 加比 例 将 会 有 效 减 小 残 差 并 增 加 系 统 响 应 , 但 容 易 导 致 系 统 激 烈 震 荡 甚 至 不 稳定 。
2、 单 独 的 I ( 积 分 ) 就 是 使 调 节 器 的 输 出 信 号 的 变 化 速 度 与 差 值 信 号 成正 比 , 大 家 不 难 理 解 , 如 果 差 值 大 , 则 积 分 环 节 的 变 化 速 度 大 , 这 个 环 节 的正 比 常 数 的 比 例 倒 数 我 们 在 伺 服 系 统 里 通 常 叫 它 为 积 分 时 间 常 数 , 积 分 时 间常 数 越 小 意 味 着 系 统 的 变 化 速 度 越 快 , 所 以 同 样 如 果 增 大 积 分 速 度 ( 也 就 是减 小 积 分 时 间 常 数 ) 将 会 降 低 控 制 系 统 的 稳 定 程 度 , 直 到 最 后 出 现 发 散 的 震荡 过 程 ,。。。 这 个 环 节 最 大 的 好 处 就 是 被 调 量 最 后 是 没 有 残 差 的 。
3、 PI( 比 例 积 分 )就 是 综 合 P 和 I 的 优 点 ,利 用 P 调 节 快 速 抵 消 干 扰 的影 响 , 同 时 利 用 I 调 节 消 除 残 差 。
4、 单 独 的 D( 微 分 ) 就 是 根 据 差 值 的 方 向 和 大 小 进 行 调 节 的 , 调 节 器 的输 出 与 差 值 对 于 时 间 的 导 数 成 正 比 , 微 分 环 节 只 能 起 到 辅 助 的 调 节 作 用 , 它可 以 与 其 他 调 节 结 合 成 PD 和 PID 调 节 。。。它 的 好 处 是 可 以 根 据 被 调 节 量( 差值 ) 的 变 化 速 度 来 进 行 调 节 , 而 不 要 等 到 出 现 了 很 大 的 偏 差 后 才 开 始 动 作 ,其 实 就 是 赋 予 了 调 节 器 以 某 种 程 度 上 的 预 见 性 , 可 以 增 加 系 统 对 微 小 变 化 的响 应 特 性 。
伺 服 的 电 流 环 的 PID 常 数 一 般 都 是 在 驱 动 器 内 部 设 定 好 的 , 操 作 使 用 者 不 需要 更 改 。
速 度 环 主 要 进 行 PI ( 比 例 和 积 分 ), 比 例 就 是 增 益 , 所 以 我 们 要 对 速 度增 益 和 速 度 积 分 时 间 常 数 进 行 合 适 的 调 节 才 能 达 到 理 想 效 果 。
位 置 环 主 要 进 行 P( 比 例 ) 调 节 。。。 对 此 我 们 只 要 设 定 位 置 环 的 比 例 增益 就 好 了 。
位 置 环 、 速 度 环 的 参 数 调 节 没 有 什 么 固 定 的 数 值 , 要 根 据 外 部 负 载 的 机械 传 动 连 接 方 式 、 负 载 的 运 动 方 式 、 负 载 惯 量 、 对 速 度 、 加 速 度 要 求 以 及 电机 本 身 的 转 子 惯 量 和 输 出 惯 量 等 等 很 多 条 件 来 决 定 , 调 节 的 简 单 方 法 是 在 根据 外 部 负 载 的 情 况 进 行 大 体 经 验 的 范 围 内 将 增 益 参 数 从 小 往 大 调 , 积 分 时 间常 数 从 大 往 小 调 , 以 不 出 现 震 动 超 调 的 稳 态 值 为 最 佳 值 进 行 设 定 。
当 进 行 位 置 模 式 需 要 调 节 位 置 环 时 , 最 好 先 调 节 速 度 环 ( 此 时 位 置 环 的比 例 增 益 设 定 在 经 验 值 的 最 小 值 ), 调 节 速 度 环 稳 定 后 , 在 调 节 位 置 环 增 益 ,适 量 逐 步 增 加 , 位 置 环 的 响 应 最 好 比 速 度 环 慢 一 点 , 不 然 也 容 易 出 现 速 度 震荡 。

- [焊接技术] 管板斜45°怎么焊接,精华都在这里了! 2020-10-24
- [故障维修] 导电嘴磨损严重的原因及解决办法 2020-10-19
- [焊接技术] 必须知道的焊缝余高的要求与处理办法 2020-10-16
- [焊接技术] 螺柱焊焊接背面印痕处理方法! 2020-07-17
- [行业资讯] 管子与管板焊接技术规程 2018-11-27
- [焊接技术] 电镀前螺纹尺寸的确定 2018-11-26






- static/file/GBT 19867.4-2008 激光焊接工艺规程12.html 2019-12-25
- static/file/GBT 2652-2008 焊缝及熔敷金属拉伸试验方法11.html 2019-12-25
- static/file/GBT 16672-1996 焊缝-工作位置-倾角和转角的定义11.html 2019-12-25
- static/file/GBT 16745-1997 金属覆盖层产品钎焊性的标准试验方法10.html 2019-12-25
- static/file/GBT 17853-1999 不锈钢药芯焊丝11.html 2019-12-25
- static/file/GBT 15169-1994 钢熔化焊手焊工资格考核方法10.html 2019-12-25
- static/file/GBT 15579.5-2005 弧焊设备安全要求 第5部分 送丝装置10.html 2019-12-25
- GBT 15579.7-2005 弧焊设备安全要求第7部分:焊炬(枪).pdf 2019-12-23
| 联系人: | 韩玉琦 |
|---|---|
| 电话: | 0755-26013200/26013464 |
| 传真: | 0755-26013188 |
| Email: | saw@sawchina.cn |
| QQ: | 2280915288 |
| 微信: | 18682260315 |
| 旺旺: | szhbkj |
| 地址: | 深圳市宝安区石岩街道塘头大道58号 |